The ProblemThe physical–digital traceability gap
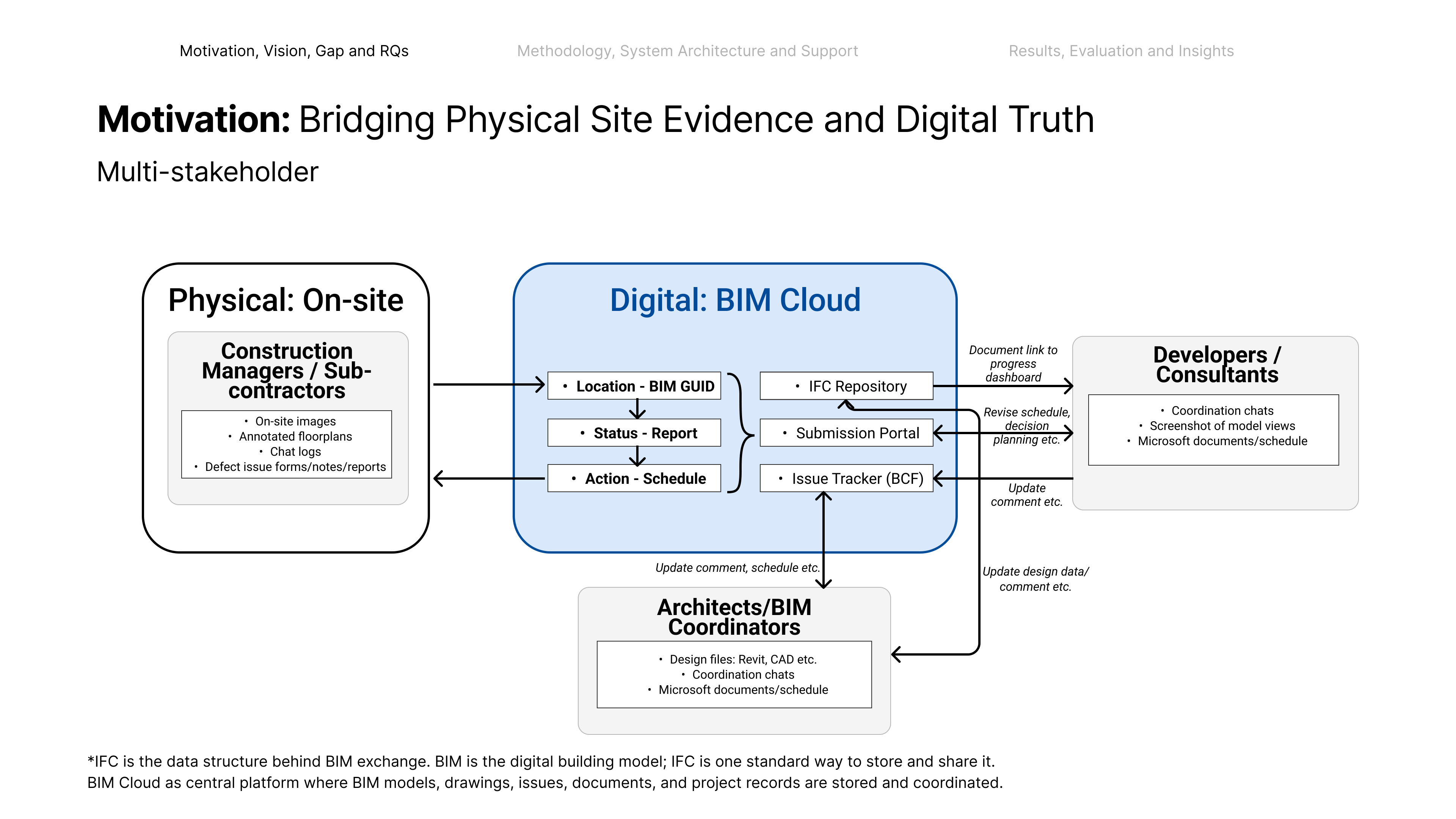
AEC projects standardise on OpenBIM/IFC, yet day-to-day site coordination still runs on manual interpretive labour: people translate unstructured evidence — photos, chat messages, floorplan patches — into model-linked, schema-compliant records. The front-line worker sees a local condition but not the BIM GUID; the coordinator sees the model but not the site context.
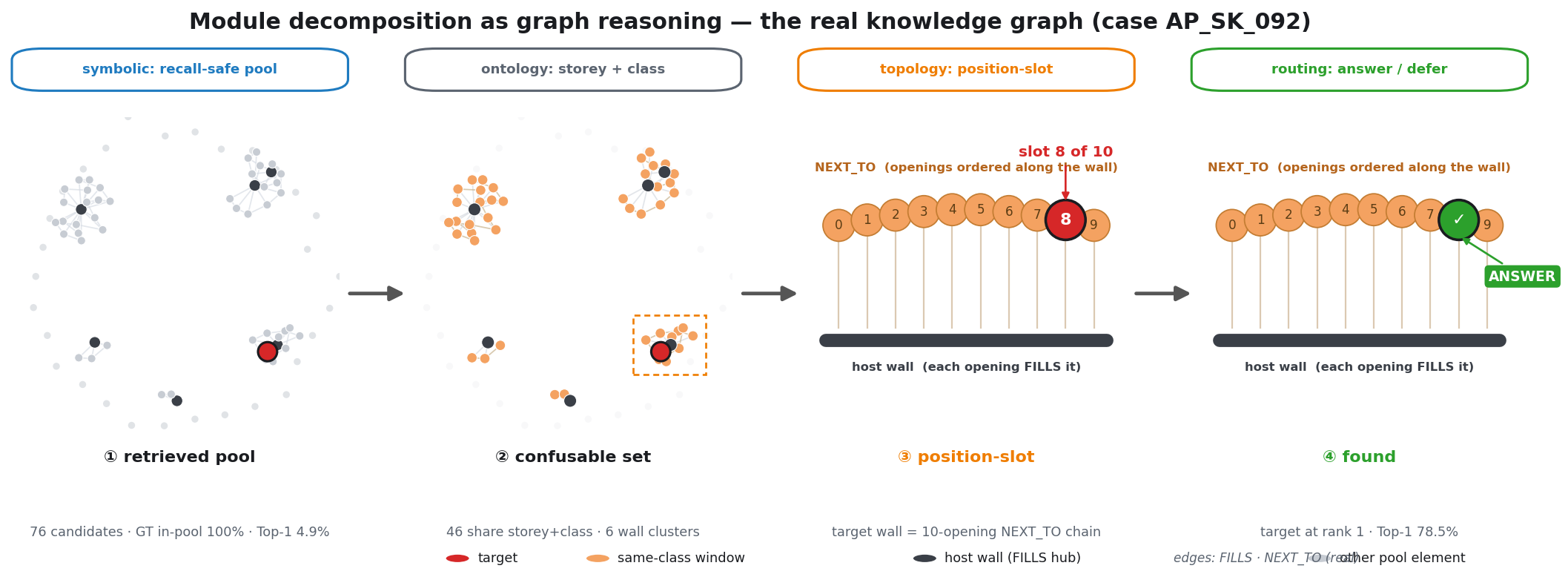
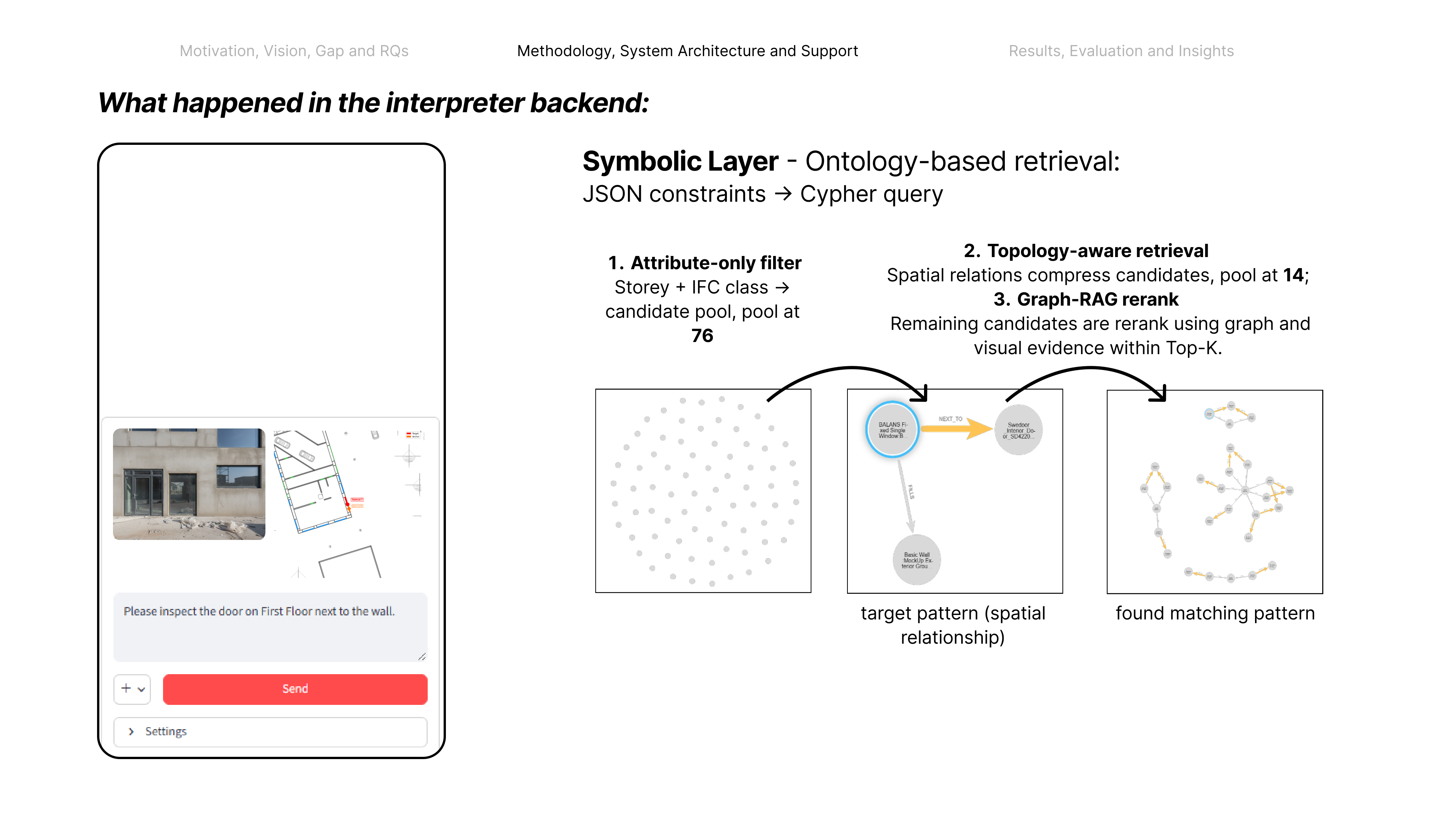
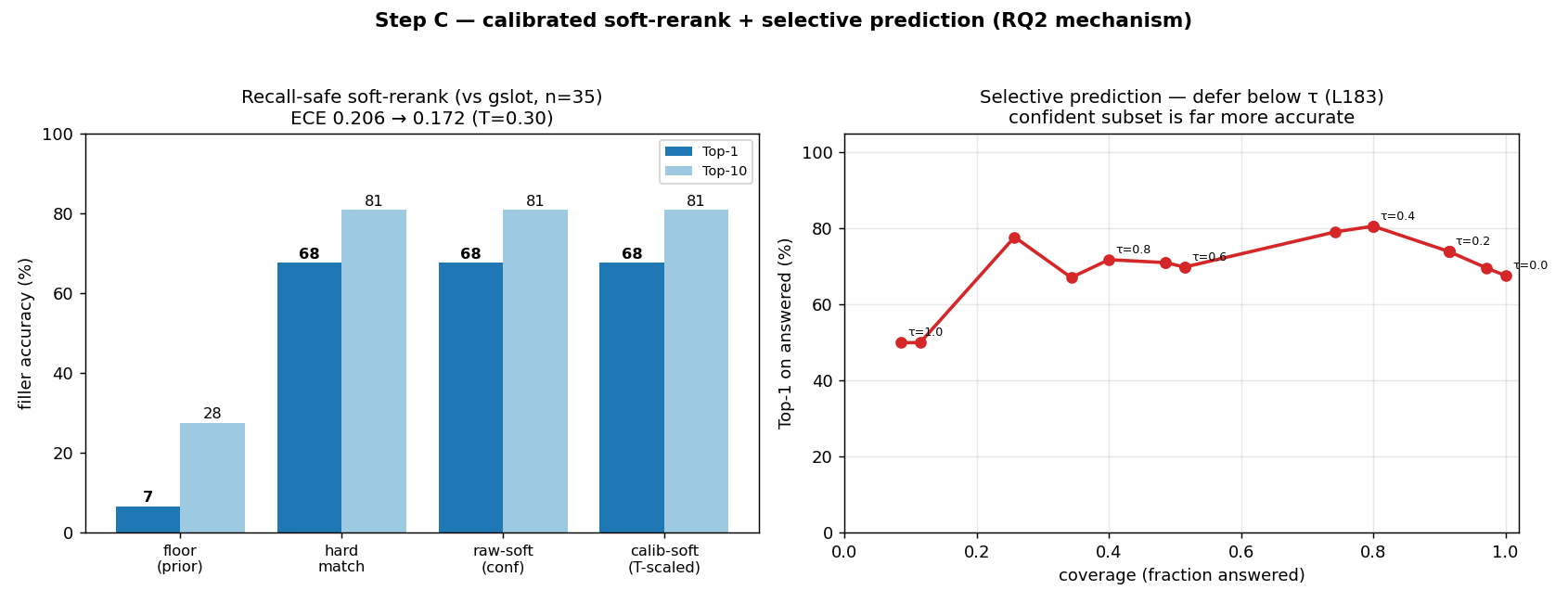
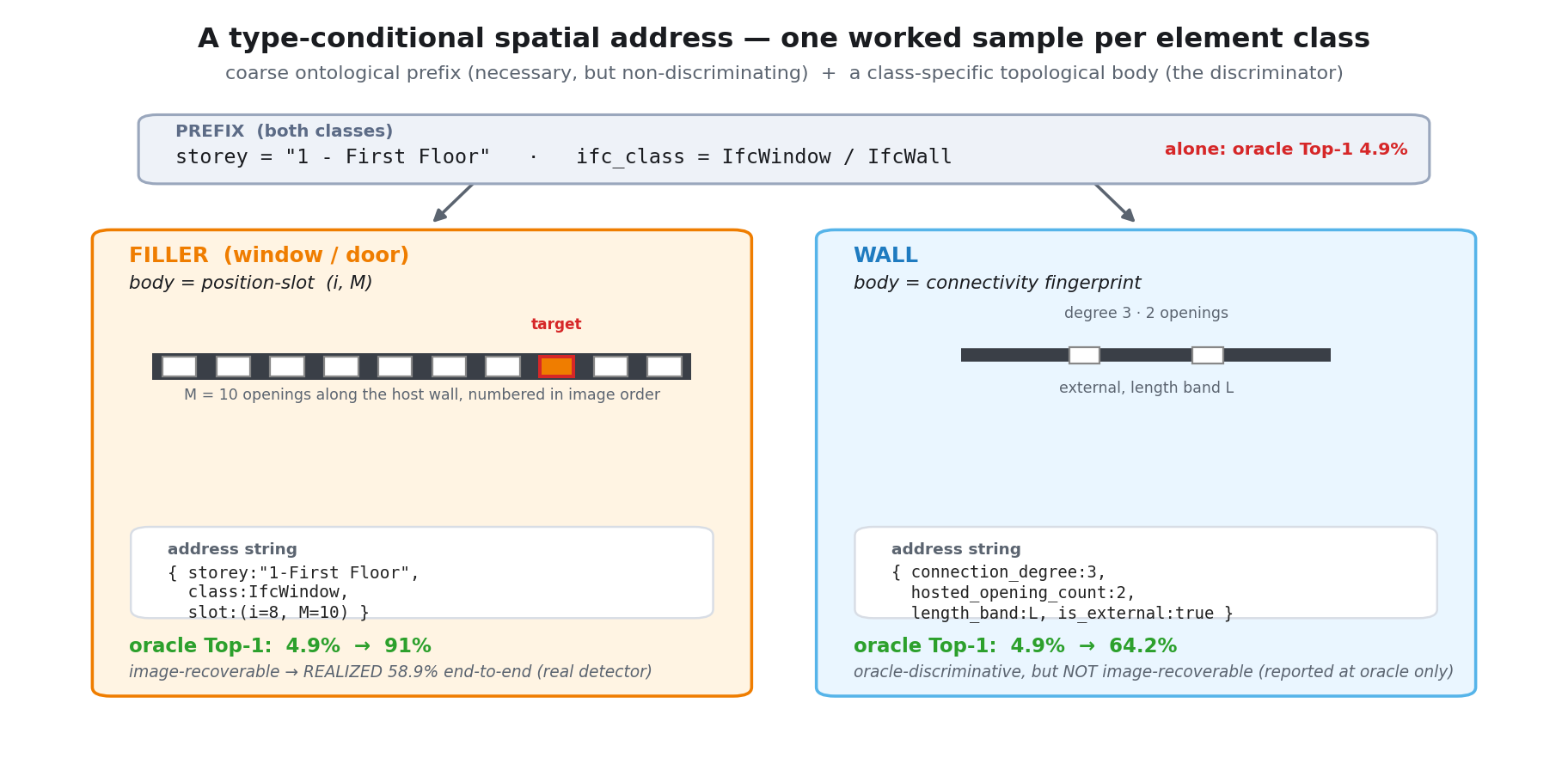
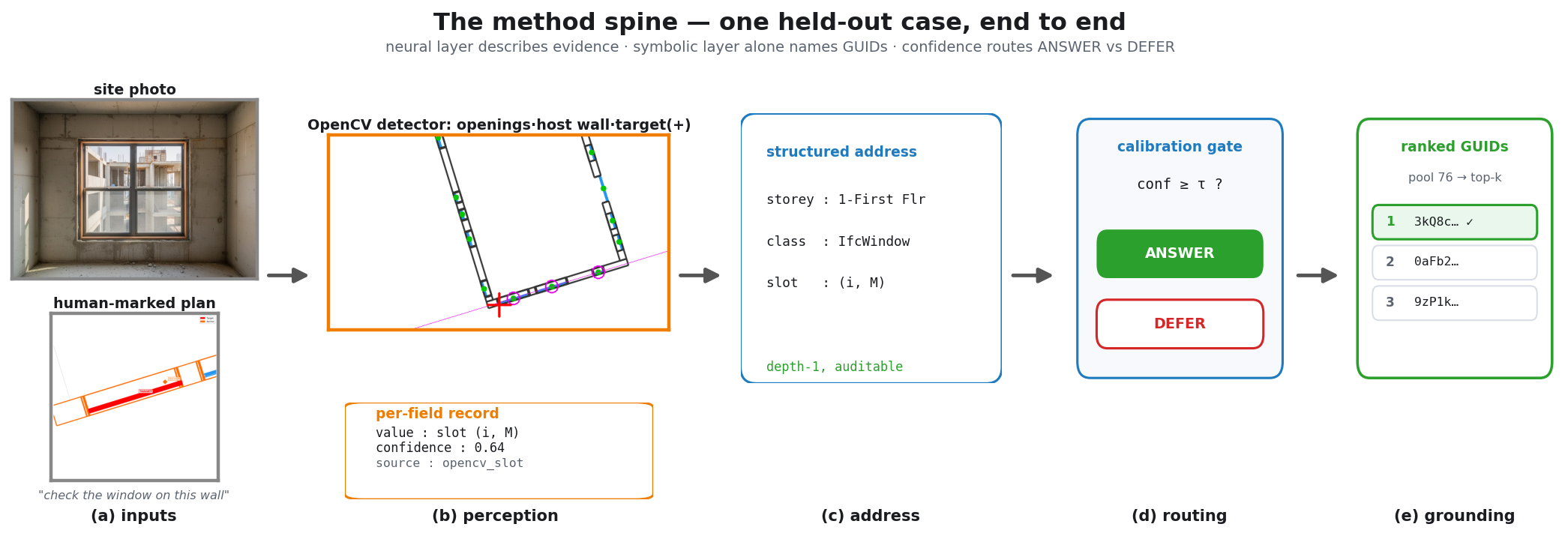
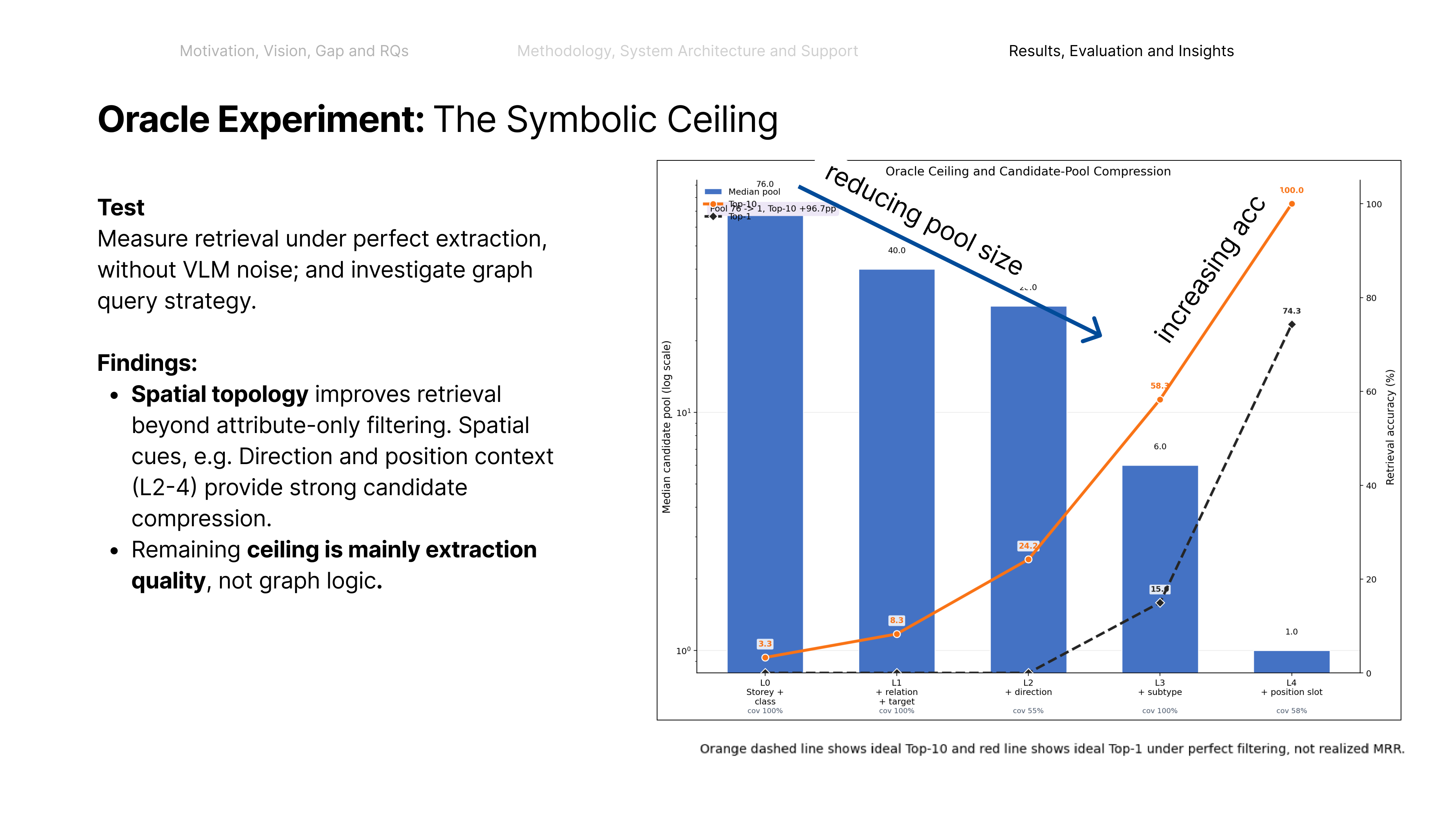
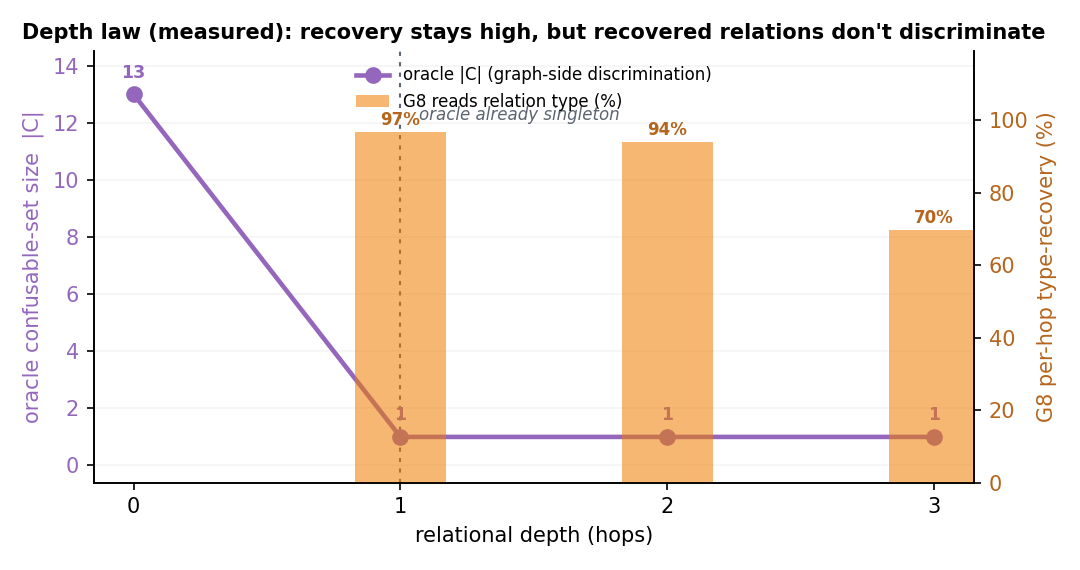
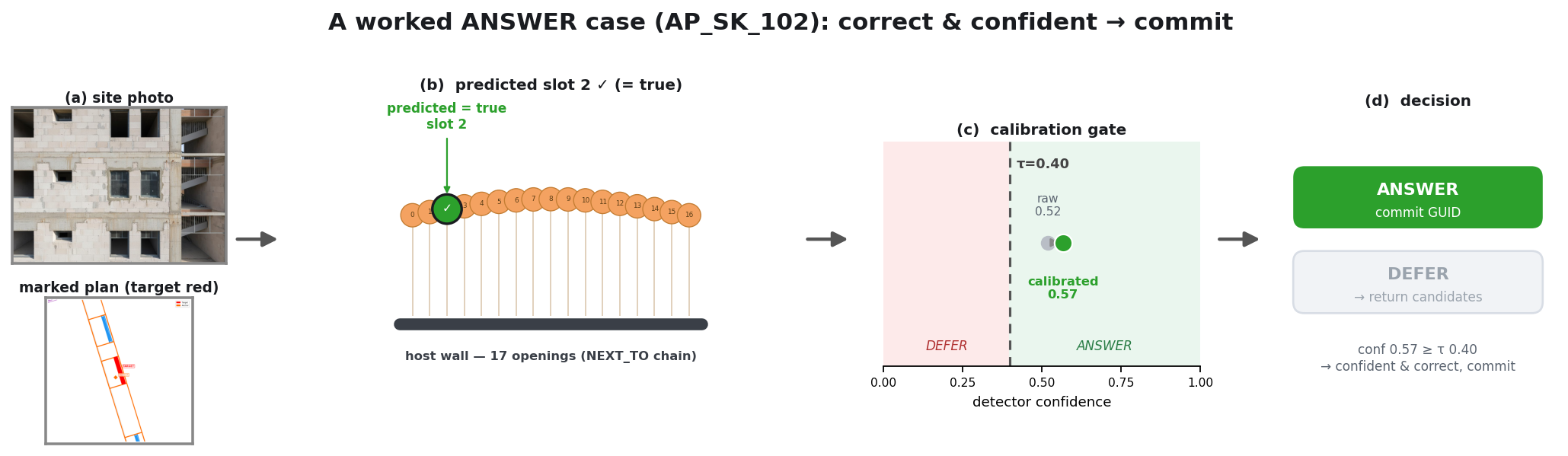
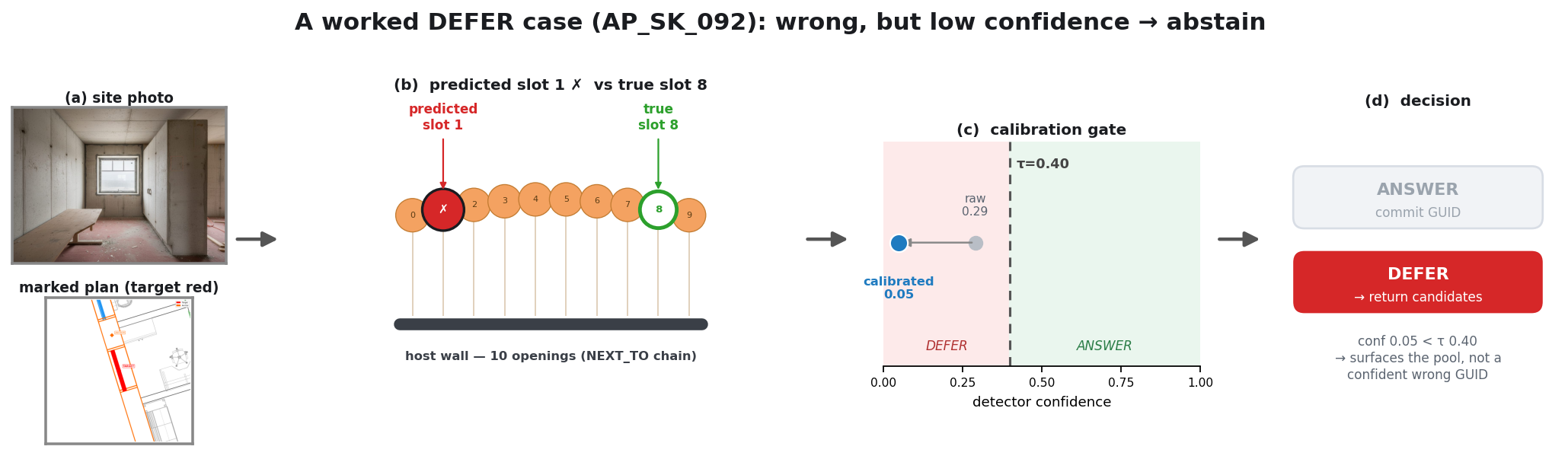
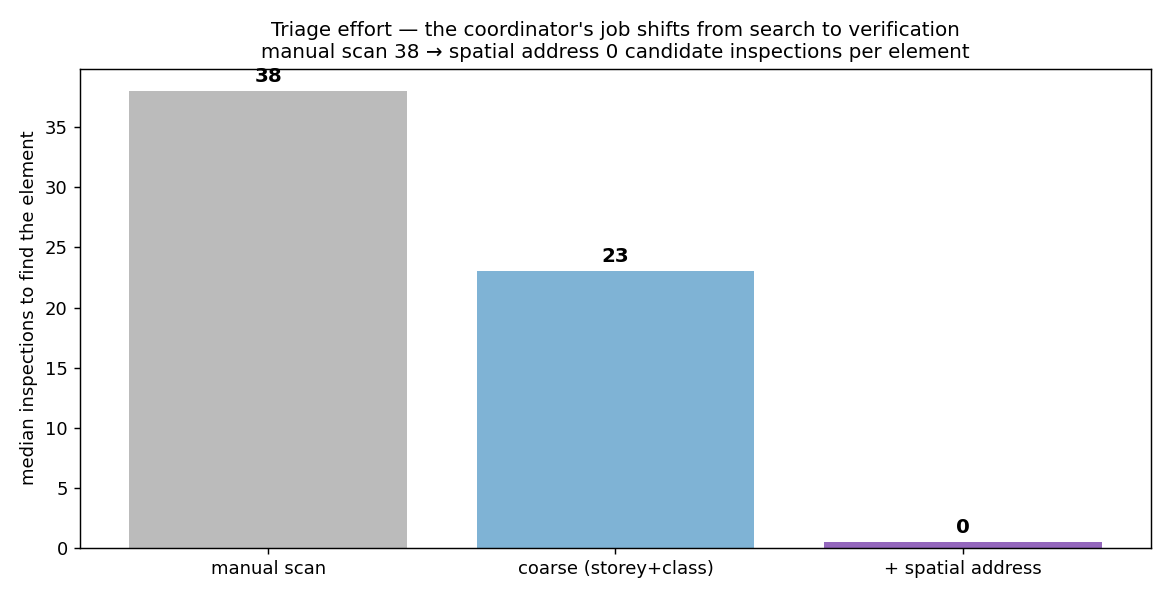
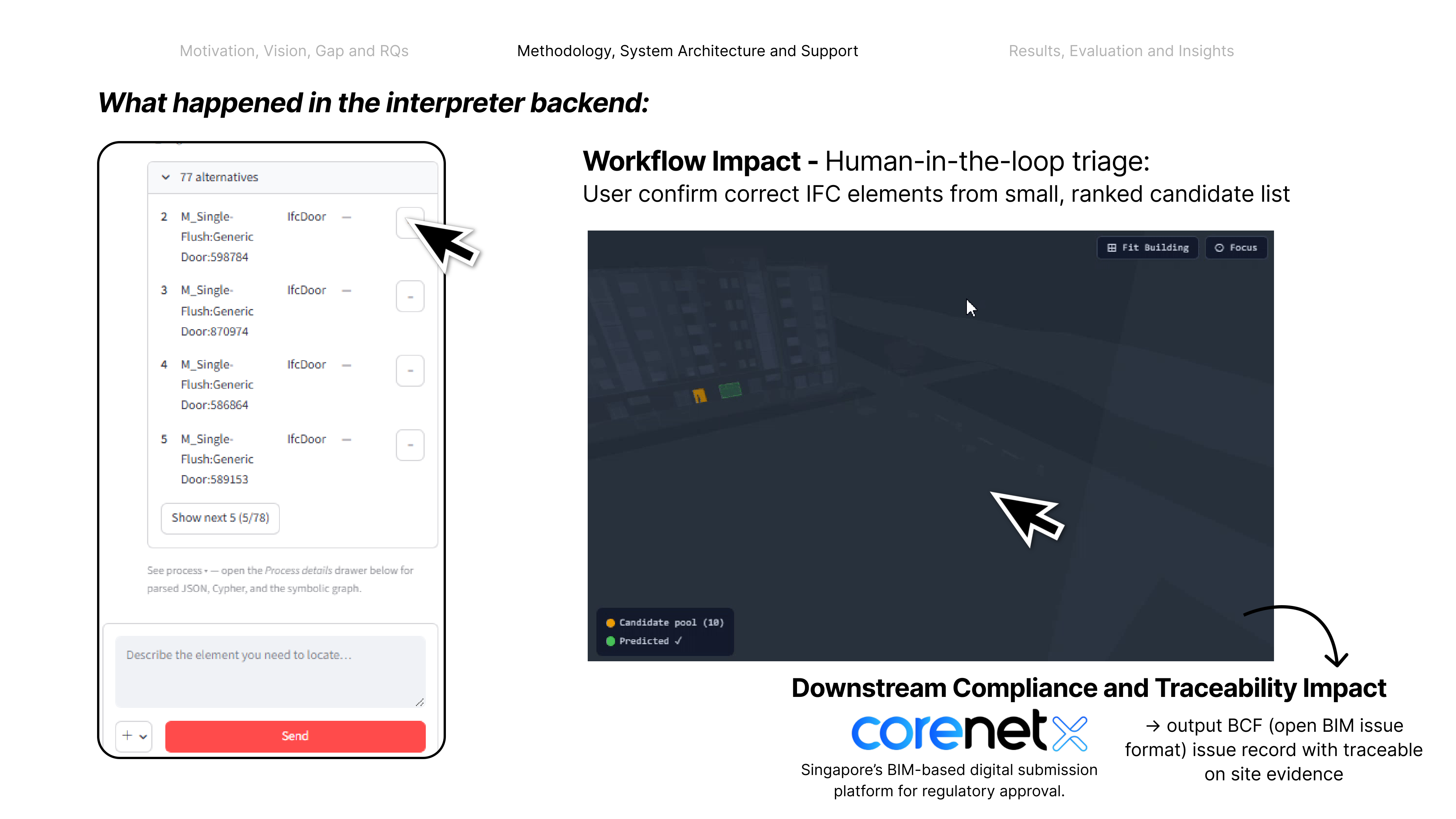
The final step is choosing one element from a retrieved shortlist that already contains the answer (median 76 candidates, ground truth present 100% of the time). So the difficulty is not retrieval but discriminating among visually identical siblings — what separates two windows is not in their pixels, it is in the building's relational structure. A black-box matcher plateaus at 6.7% right-first with the answer already in the pool. This work makes that relational signal explicit as a spatial address that can be read from evidence and executed against BIM.